障害者支援を行っている神奈川工科大学へのインタビュー(第1回)
厚木市の自然豊かな環境にキャンパスを置く神奈川工科大学は、2013年に開校50周年を迎えた長い歴史のある大学です。
2015年4月には新たに「看護学部看護学科」と「工学部臨床工学科」を開設するなど、福祉の振興に貢献する様々な取り組みを行っています。
今回は、福祉分野のロボット開発に取り組んでいる、創造工学部ロボット・メカトロニクス学科の河原崎教授にお話をお伺いしてきました。

ロボット・メカトロニクス学科では、どのような研究を行っているのでしょうか。

現在、ロボットは日常の様々な場面で我々の生活環境に入り込み、共存しつつあります。 お手伝い、サービス、介護、パトロール、友人・ペットなど、これらは生活を快適にし、豊かにするため、そして今日の高齢社会の中で自立や安心できる介護に向かうためのものとして存在していくでしょう。
ロボット・メカトロニクス学科では、このような人と共存するロボットの研究・開発を行っています。
福祉分野のロボット開発に取り組まれていらっしゃいますね
もともと、本科は2000年に開設された「福祉システム工学科」が前身となっています。
前身である福祉システム工学科から「福祉マインド」を受け継ぎ、授業科目にも人間・福祉・医療の分野を取り入れているため、人との共存には何が大切かを学びながら、ロボットの研究・開発に取り組んでいます。
大学での研究成果の一部をご紹介いただきました。
パワーアシストハンド
開発者:先進技術研究所 山本圭治郎 特命教授


こちらはリハビリテーションの補助機器です。ベローズ(空気袋)に空気を送ることによって、膨張・収縮を繰り返し行い、手の曲げ伸ばしを補助します。手が不自由になってしまったときの機能回復を、安全に、負担を少なくサポートすることができます。
開発にあたっては、リハビリテーションセンターや老人介護施設などで実証実験を行い、手指に運動麻痺のある方(8名)に7〜30分間(約400〜500回)試用していただき、性能評価をしています。2014年6月からは、一般に販売が開始されました。
電動車いす操作システム
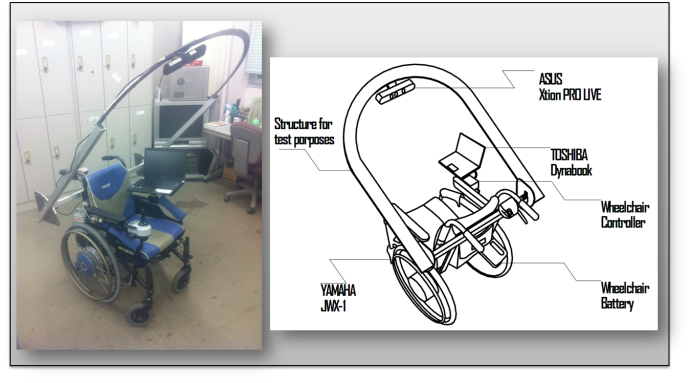
使用者のジェスチャによって電動車いすを操作するシステムで、2012年に開発したものになります。
開発のきっかけは、イギリスで同じく電動車いすの研究をしている大学教授の話でした。
通常、電動車いすはジョイスティックで操作しますが、イギリスでは車いす使用者でも一人で生活をしているケースが多く、日常生活のなかで料理をしたり、荷物を持ったりした際に両手が塞がってしまい、操作ができなくなる場合があります。
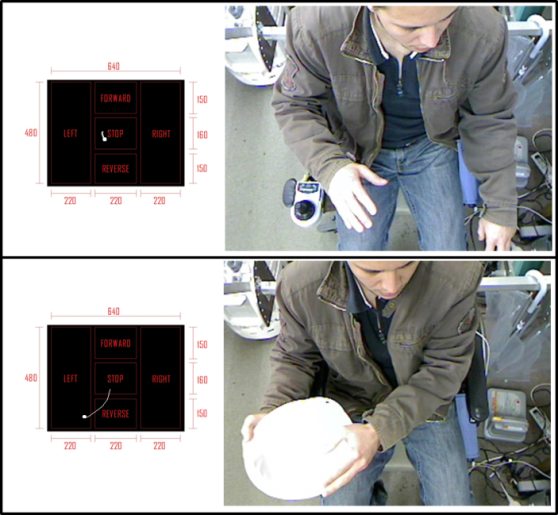
そこで、このシステムでは、手の動きをカメラセンサーで感知し、手の位置によって前進や後退、旋回を行います。手をかざすことにより、ジョイスティックからセンサーへ、操作方法を切り替えることができます。

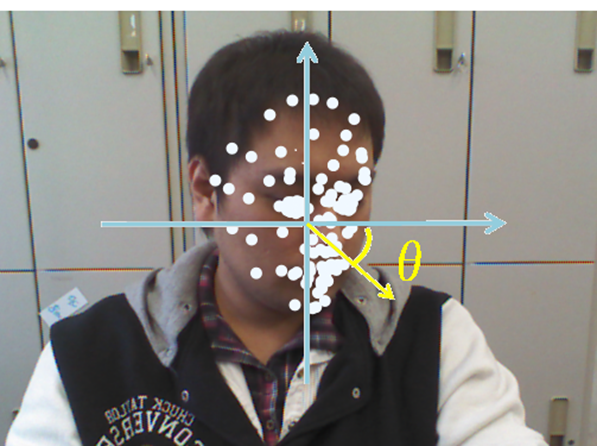
こちらは昨年の2013年に改良したものになります。
従来型では、お皿を持ったりすると手の肌色が隠れてしまい、センサーがうまく認識できない場合がありました。
そこで、顔の向きによって操作する方法に変更しました。また、首の角度の大小で動きの強弱を調整できるようになっています。ジョイスティックからセンサーへの切り替えも、音声で行うように改良しました。

取材先
所在地:神奈川県厚木市下荻野1030 学校法人 幾徳学園 神奈川工科大学